




DC motors and stepper motors are widely used in different industrial applications.
Both motors function on a direct current (DC) input and provide a wide range of speed and torque configurations.
Depending on their functionalities, these motors can be used in applications such as CNC machines, conveyors, cranes, electric scooters, etc.
So, what exactly is the difference between them? And which one to choose for your application?
This article points out the differences between DC motors and stepper motors and lists some of the applications for both types of motors.
DC Motor vs Stepper Motor: Differences
| Parameter | DC motor | Stepper motor |
|---|---|---|
| Power input | Continuous supply | Pulse signals |
| Precision | Comparatively low | High |
| Feedback | Closed-loop | Open-loop |
| Speed | Variable speed | Under 2000 RPM |
| Torque | Uniform torque | High torque at low speed |
| Efficiency | Higher (around 85%) | Comparatively low |
| Maintenance | Comparatively high | Low |
| Applications | Cellphone vibration, conveyor, crane, etc. | CNC machines and 3D printers |
Difference between DC and Stepper motors
With the advancement in technology, new types of motors, such as brushless DC motors, stepper, servo, etc., are available that offer significant advantages over their predecessors.
DC motors are one of the oldest motors that have been through various development phases over time and are still one of the most widely used motors for various applications.
Stepper motors are a relatively new type of motors that provide better precision and control in the shaft movement.
1. Motor Control

The primary difference between DC and stepper motors is their control system.
DC motor is powered by a battery or a DC power source that passes through an arrangement of transistors to supply the desired power.
The speed of the motor can be varied by varying the input voltage, and the direction can be reversed by reversing the polarity of the DC current.
Stepper motors, on the other hand, are controlled by pulses generated by the controller.
For constant speed in a stepper motor, the pulses are of equal duration with equal intervals between successive pulses.
The use of pulses provides a step-like motion in a stepper motor. The higher the number of steps, the lower the degree of rotation per pulse, and the higher the control for a certain degree of rotation will be.
Speed of a stepper motor can be varied by varying the frequency of the pulses. A higher frequency will result in a higher RPM and vice-versa.
2. Precision and Reliability
Stepper motors offer higher precision and reliability than DC motors.
A typical DC motor is made of an armature, stator, rotor, and carbon brushes. The carbon brushes are used to maintain contact between the rotating armature and the motor terminals.
DC motors work in a continuous flow where the brushes are always in contact with the armature to.
Stepper motors are a type of brushless DC motor in which the rotor consists of multiple evenly-spaced windings and the stator has permanent magnets.
The stepper motor controller activates the successive sets of coils to rotate the rotor, and the resolution of a stepper motor depends on the number of steps.
Each step of the motor produces a 360/n degrees of rotation in the shaft, where n is the number of steps.
For example, a 40-step stepper motor will have the least degree of rotation as 360/40, i.e 9 degrees.
Therefore, it can produce a motion that is precise up to 9 degrees.
This type of control on the degree of rotation is not available in DC motors, making them less precise than stepper motors.
3. Feedback System
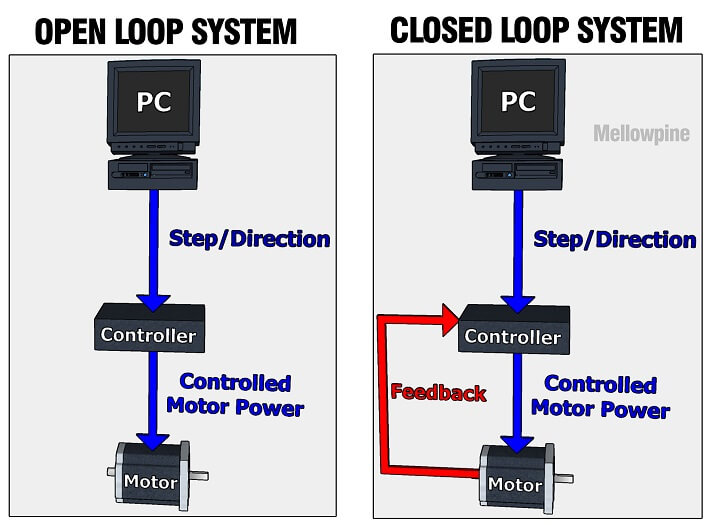
Both stepper motor and DC motor operate in an open-loop configuration.
Generally, stepper motors function in an open-loop system and there is no feedback from the output end.
As a result, stepper motors can skip steps, known as slipping, and the system will continue functioning without detecting an error.
Whereas DC motors function in a closed-loop system and can detect any fault in the functioning of the motor to stop the process immediately.
4. Speed and Torque
DC motors can operate at a wider range of speeds than stepper motors.
Stepper motors are meant to operate at lower speeds (under 2000 RPM) for a shorter duration as operating for a long duration tends to overheat the motor due to continuous high-current input.
DC motors have almost constant torque output over their speed range, whereas stepper motors have varying torque with the highest torque output at low speeds, which reduces uniformly as the speed increases.
In an overload condition, when the load is greater than the torque of the motor, stepper motors can skip steps without triggering any feedback to install a preventive mechanism.
Whereas overloading of DC motors will stall the motor and a preventive mechanism can be installed to turn off the electric supply automatically and prevent the windings from being damaged.
5. Efficiency of the Motor
DC motors consist of carbon brushes that maintain a point of contact between the armature and motor terminals.
This results in a loss of energy in the form of friction between the carbon brushes and the rotor.
Despite the energy loss in the form of friction, DC motors have greater efficiency (around 85%) than stepper motors.
This is because stepper motors require comparatively more power input than DC motors, irrespective of the load, which increases their power consumption.
Whereas DC motors require variable current for different values of torque load. This reduces the overall power intake and thereby lowers the heat losses in the windings of the motor.
6. Noise Factor
DC motors generally produce comparatively less noise than stepper motors.
The noise generated during the operation of DC motors is due to the mechanical rubbing of the carbon brushes against the rotor and the sparks that occur in the gap between the stator and rotor.
Therefore, DC motors are ideal for applications where a quiet operation is required.
7. Fault Detection
Stepper motors have windings wound on the teeth of the stator, that are energized sequentially to rotate the motor shaft.
Overloading the motor can result in the energization of the windings without producing the corresponding motion of the shaft, known as slipping or missing the step.
However, the open-loop system used in stepper motors does not detect the fault and therefore it is difficult to identify the exact reason for the fault.
Whereas DC motors work on a closed-loop system that detects the fault and can activate the corresponding safety system, such as a fuse, to prevent the winding from being damaged.
8. Maintenance
In DC motors, carbon brushes are used to maintain contact between the rotating motor winding and the motor terminals.
This results in friction between the carbon brushes and the rotor, causing the brushes to be chafed at the point of contact.
As a result, the carbon brushes must be replaced periodically, increasing the maintenance of DC motors.
On the other hand, stepper motors are brushless motors, eliminating the wear due to friction.
Therefore, stepper motors require comparatively less maintenance than DC motors.
9. Applications

The step-based motion of stepper motors offers higher precision to control the degree of rotation of the shaft, and the precision of the stepper motor is determined by its number of steps.
This makes stepper motors suitable for applications where exact rotation is required, such as 3D printers and CNC machines.
In these machines, a microcontroller sends in the electrical signals to energize the motor and produces the precise motion of the machine.
On the other hand, DC motos offer a wider range of RPM with little control over the degree of rotation.
This is why DC motors are suitable for lathe machines, where RPM control is more valuable over the precision of rotation.
These motors are also used in various applications like mobile vibrators, conveyors, etc.
Final Thoughts
DC motors have been around longer than stepper motors and therefore due to various developments over time, DC motors offer better efficiency.
On the other hand, stepper motors are ideal for applications where precision and control are the primary requirements.
Although both the motors have a low initial cost, DC motors require comparatively more maintenance, which increases their overall cost.
Overall, both the motors offer excellent outputs, according to their functionality, and selecting the right motor for your application will ensure perfect results.
frequently asked questions (FAQ)
Can the position of DC motors be controlled precisely?
Yes, it is possible to make modifications to a DC motor to provide precise rotation. A rotary encoder can be coupled to the motor shaft and a feedback mechanism can be set up to track the position of the degree of rotation. This type of system is used in a servo motor.
What is a commutator in a DC machine?
The commutator is used in DC motors to maintain the contact between the armature winding and the motor terminals. Commutator converts AC to DC when DC motor is used as a generator and DC to AC when it is used as a motor.
What is the difference between stepper and servo motor?
Stepper motor uses steps to control the rotation of the shaft. The resolution of the stepper motor depends on the number of steps. Servo motors on the other hand have a feedback mechanism that relays the position of the motor back to the controller. The controller detects the position and makes corrections in case of an error. As a result, servo motors are more expensive than stepper motors.